
研究内容
| ロボット切削 |
東京大学 臼杵研究室
目的
6軸多関節ロボットを用いた新しいシステムの開発
 6軸多関節ロボット |
 ミーリングヘッド |
多関節ロボットにミーリングヘッドを搭載したロボット切削システムを開発し,従来加工法に対してランニングコスト低減およびロボットによる加工精度向上を目指す。 |
内容
| ●ロボットの特性把握 | ●ロボットによる自動計測システムの開発 |
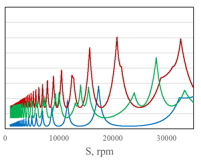 安定加工限界線図による 静的な剛性評価の例 |
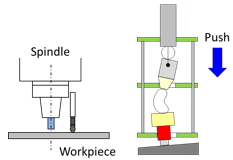 被削材の「うねり」や「板厚」の 自動計測システムの提案 |
●ロボットの運動特性把握と誤差補正システムの開発
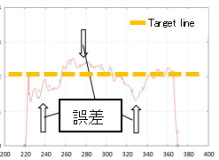 |
NC指令値に対してターゲットからズレた動きを 補正するシステムを提案。 自動計測システムを活用し補正精度向上を検討。 |
成果
ロボットの適用による、加工精度向上と自動化によるコスト低減
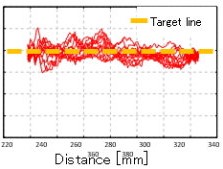 |
開発したオフライン補正システムを利用した際の加工後の深さ精度測定結果の一例。 |
 自動板厚測定 システム |
1.ケミカルミリングの代替法としてロボット切削の有効性を提案
2.板厚測定の手法と機構を開発し特許を出願中
2.板厚測定の手法と機構を開発し特許を出願中
今後の課題
所要の加工精度を達成するためにリアルタイム補正技術の開発を目指す。