
研究内容
| ロボットシーリング |
東京大学 土屋研究室・馬渡研究室
目的
シーリングの手作業工程の自動化による高速化と省力化
 手作業 |
 ロボットシーリング |
シーリング工程は手作業によって行われており、作業者の養成には長い時間を要する。ロボットによる自動化を行うことによって、工程の高速化・省力化を図る。 |
内容
●熟練者の手作業をモーションキャプチャーでデータ化し、解析・評価・最適化し、ロボットの運動に反映
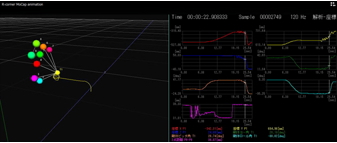 モーションキャプチャーによる運動解析 |
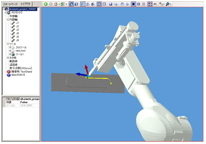 ロボットシミュレーション |
●ロボットに特化したシーリングガンの開発
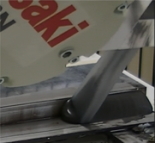 |
新しい機構の開発により、従来のシーリングガンよりもシーラントの吐出量を安定させ、また、吐出の開始・終了のタイミングをロボットによって高精度に制御することに成功した。 |
●シーリング形態の異なる、複数種類の部材において自動化を達成
成果
ロボットの適用による、作業時間の短縮および品質の向上と均一化
 |
複数種類のシーリング形態において、作業の効率化、品質の向上および均一化を行った。また、適用箇所によっては専用のノズルを開発し、仕上げ工程の省略を図った。 |
今後の課題
更に多くの種類の部材に対して、シーリング作業の自動化を目指す。